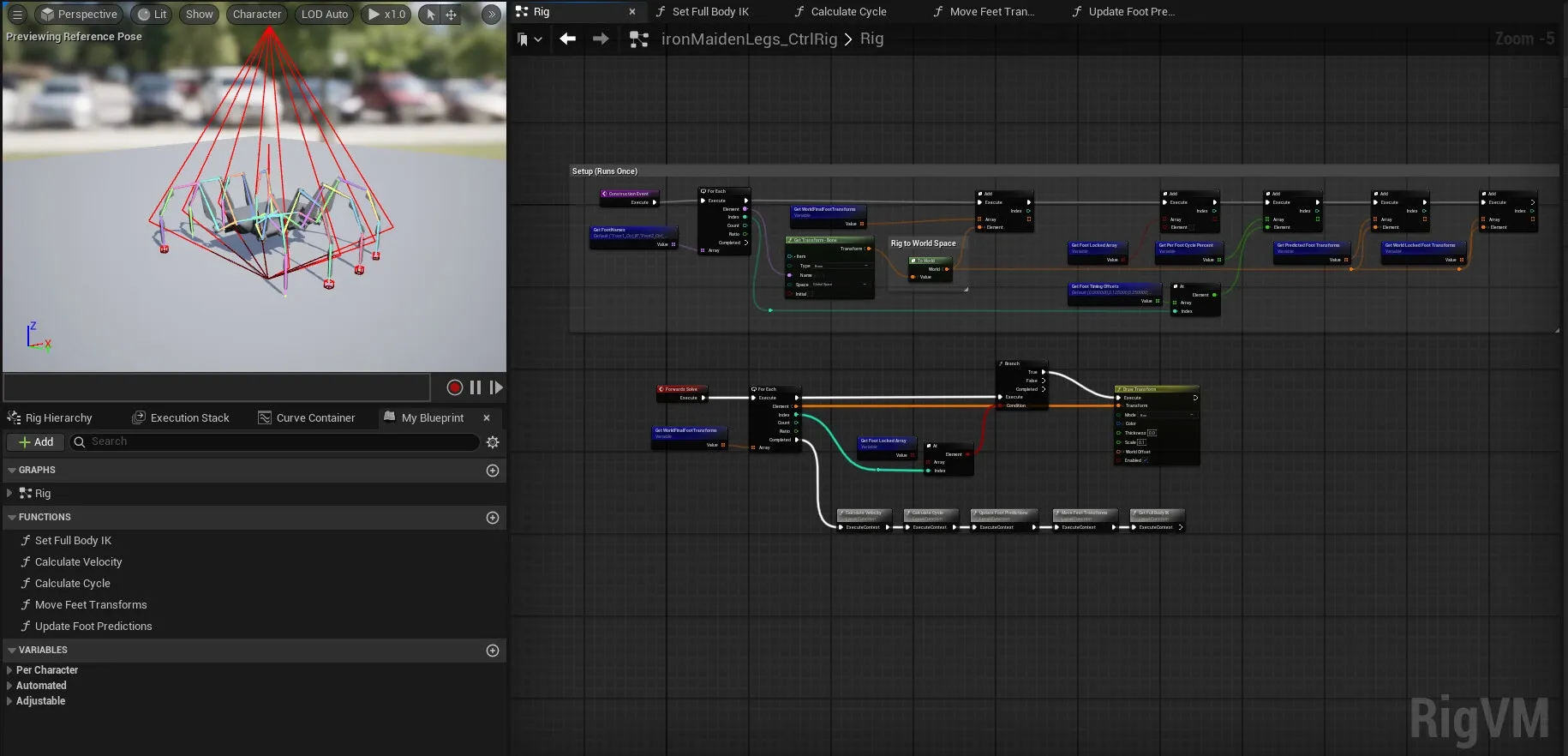
Rig can move at variable speeds, as it is all driven by the velocity of the root bone.
Calculating Velocity
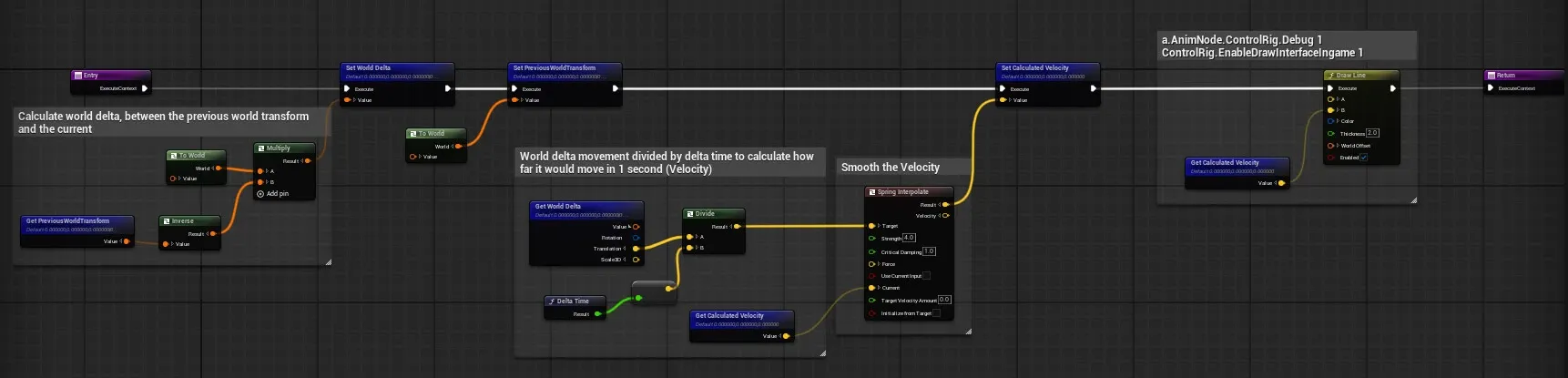 World delta divided by delta time
World delta divided by delta time
Calculating Foot Timing
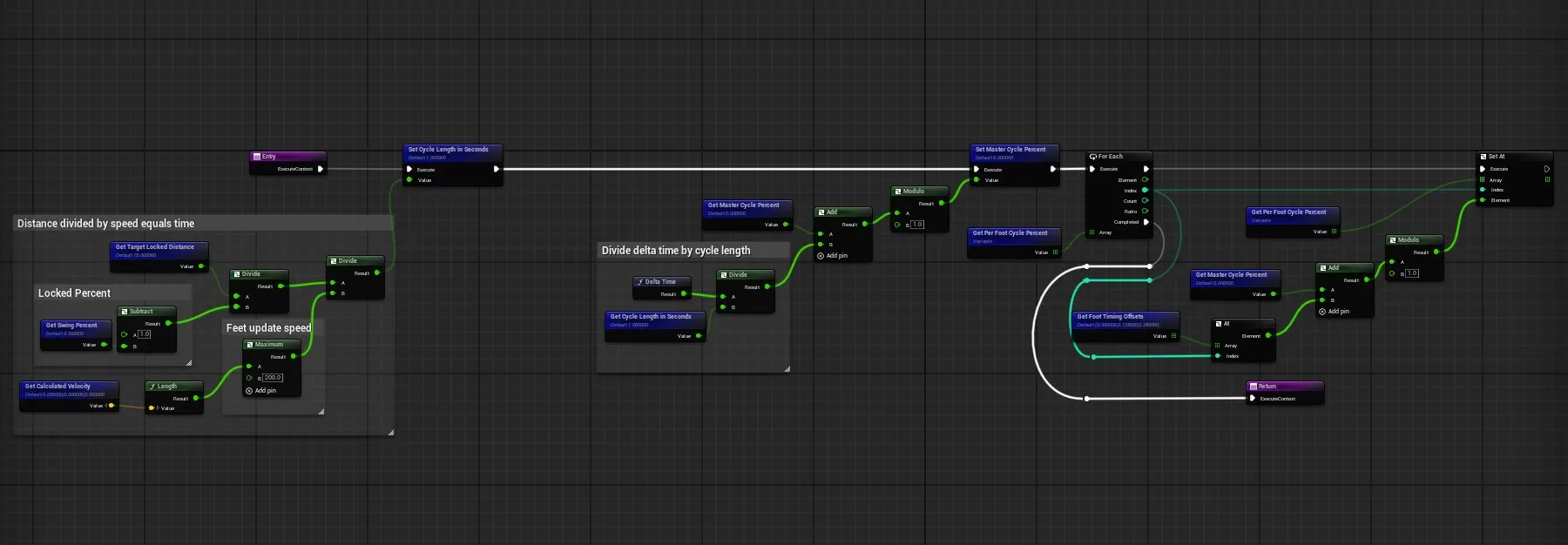 Offset time for each foot is set manually in an array
Offset time for each foot is set manually in an array
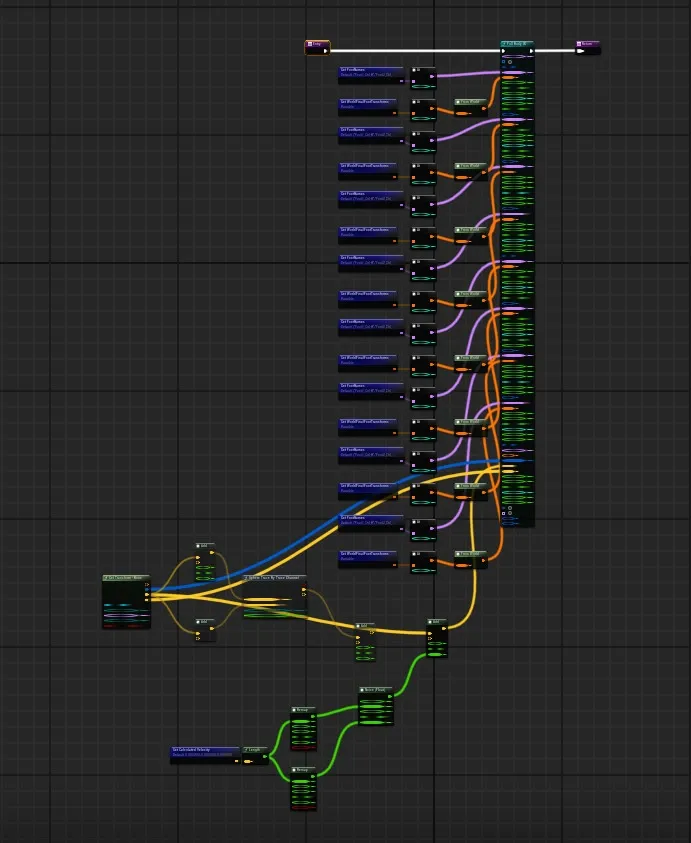
Updating Foot Predicitions
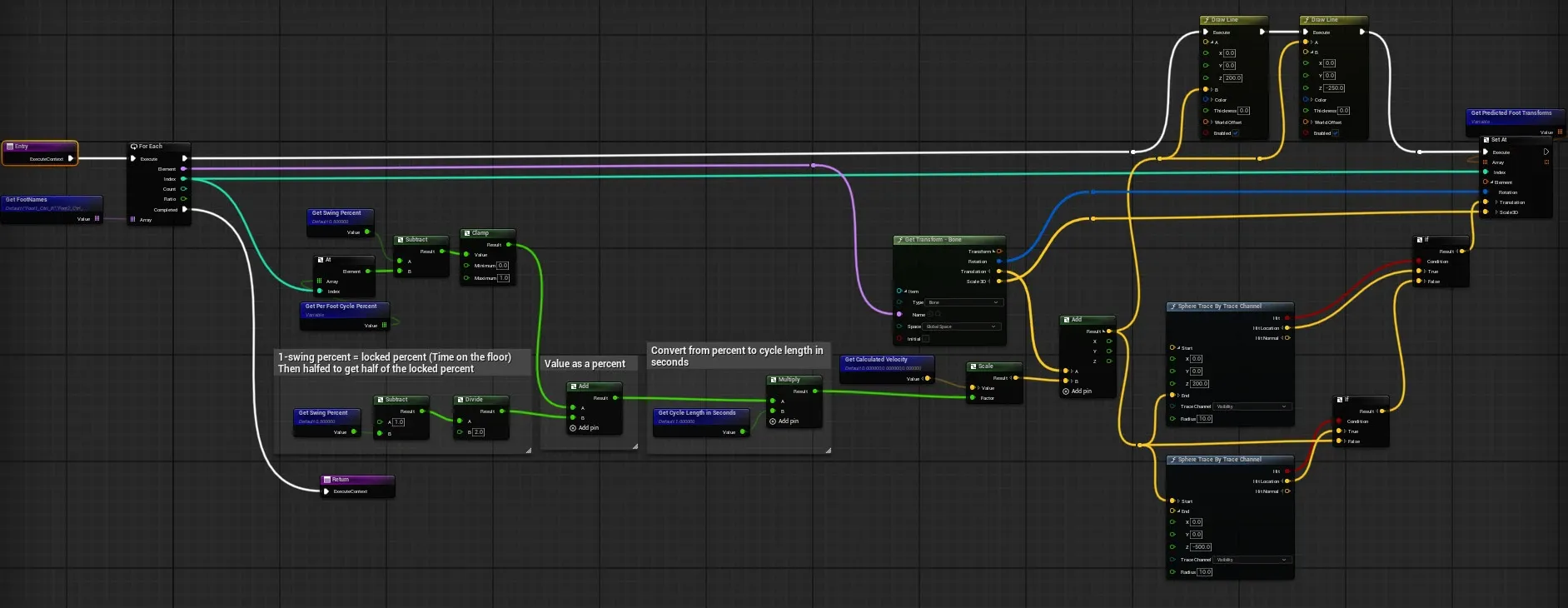 Draws the line trace shown in the first image and adds calculated velocity to determine new location for foot
Draws the line trace shown in the first image and adds calculated velocity to determine new location for foot
Move Feet Transforms
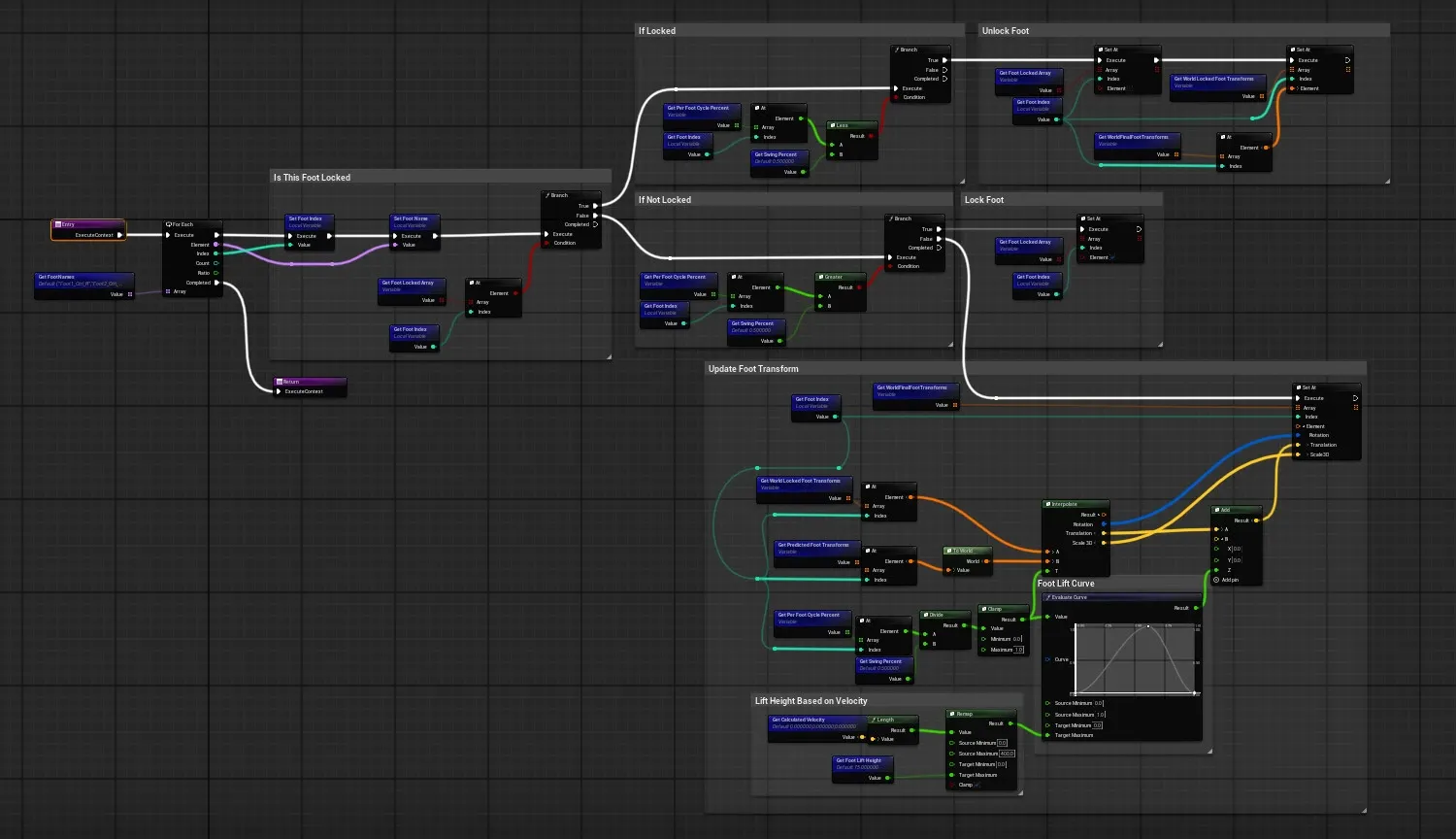 Determines if feet are locked or not, then lerps between previous foot location and the predicted one, while also raising and lowering the foot
Determines if feet are locked or not, then lerps between previous foot location and the predicted one, while also raising and lowering the foot
IK Setup
Root bone is also affected by random noise on the z axis driven by velocity